
本文
【ブログ】くろまろ塾 ロボットプログラミング講座 その4【最終回】
くろまろ塾本部講座 基礎から学ぶ ロボットプログラミング講座
~RoboRAVE (ロボレーブ)大阪大会を目指そう~
(その4:プログラミング実習6回目・最終回)
更新日:2024年9月25日更新
◆今回のレポート
こんにちは。 くろまろ塾運営ボランティアスタッフ 記録担当の栗栖です。今回は8月24日開催の 「基礎から学ぶ ロボットプログラミング講座」の6回目で実施された「最終回の実習」 についての記事です。
◆出席者
出席者は17組19名。出席カードも満了となりました。
図1)満了の出席カード
1.プログラミング実習:6回目の課題
これまでの集大成とし、プログラミングスキルを確実に身に付けることが主眼です。
(1)ミッション
持参又は改めて製作したピン球運び用荷台を車型ロボットに取付け、図2)のピン球運びのコースに沿って走行し、出発前に荷台に乗せたピン球を終点の箱の中に入れます。これまでの総仕上げで、繰り返して行うことでライントレーシングプログラムを完全にマスターしていきます。

図2)ピン球運びのコース
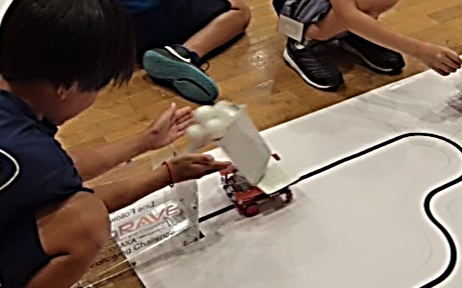
(2)ピン球を箱に入れるためのノウハウの解説
ピン球運び用の荷台は、運ぶ途中でピン球が落ちないように製作する必要があります。しかし、このことは終点で手を触れることなく、ピン球を箱の中に入れるという目的と相反する条件となります。これを解決するため、ヒロ先生からピン球を確実に入れるためのプログラミング・ノウハウが解説されました。
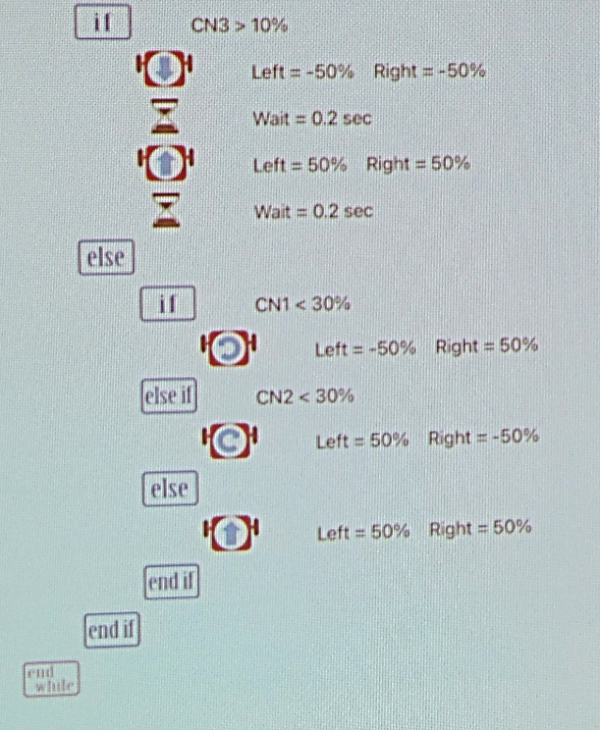
図3)箱の前でロボットを前後に揺らすプログラムの例
図3)がそのプログラム例です。箱に近づいてきたらCV3又はCV4の前方センサーを用い、短時間で前進と後進を繰り返して車型ロボットを前後に揺らします。この際、プログラムの実行は前の方にあるものが優先されるので、最初に組み込むことが大事とのこと。
(3)ミッションの実行
参加者は、手際よくプログラミングと荷台の製作を行っていきました。プログラムは基本的には解説通りですが、センサーやモーターの設定、待ち時間などは各自の好みです。また、荷台も各自が独特の工夫を凝らしています。
ここで、目に付いた快作をいくつか紹介します。なお、ロボットの命名は筆者の独断です。
図4)大型カーゴ ロボット ピン球を一度に十個以上も載せられる大型です。しかし、途中で落下するため何回も改造を重ね、最終的にはU型樋に6個載せる形となったようです。それでも途中で2個落下し、何とか到達した4個の内3個は荷台を揺らすことで箱に入れることに成功しました。

図5)シンプル・タワー ロボット 構造簡単で組み立て容易ですが、揺らしても成功するのは難しかったようです。
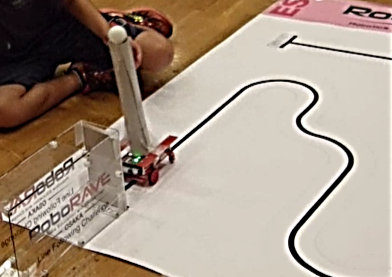
図6)ペンギン ロボット ピン球を口に咥えて運ぶ可愛いペンギンのようなロボット。揺らしてピン球の投入に成功。
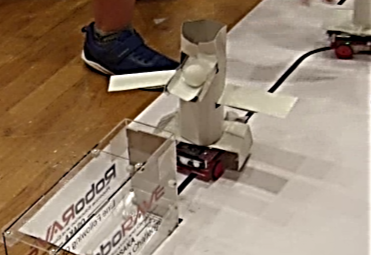
図7)覆面ロボット 車型ロボットを頭から被る覆面のような箱で覆い被せて変身させた怪作。ピン球は何故か横に取付けています。発想が奇怪で目を引きましたが、成功は難しかったようです。
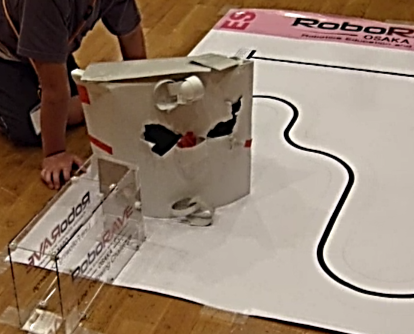
図8)頭脳的機構ロボット 荷台前方に舌のような可動レバーが組み込まれており、箱に当たると押し込まれてレバー後部が 「くの字」 に折れてピン球を前方に打ち出すという頭脳的機構を組み込んだ秀作。鮮やかに成功。
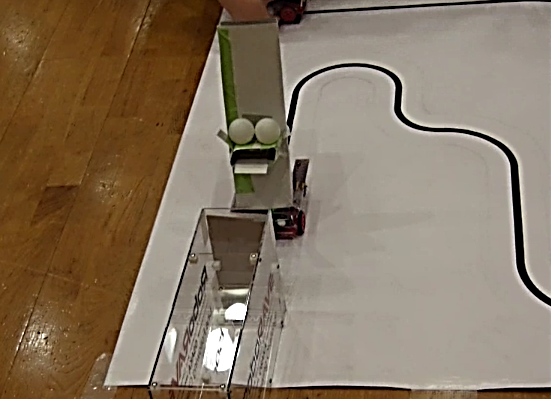
図8-1)箱に当たる直前
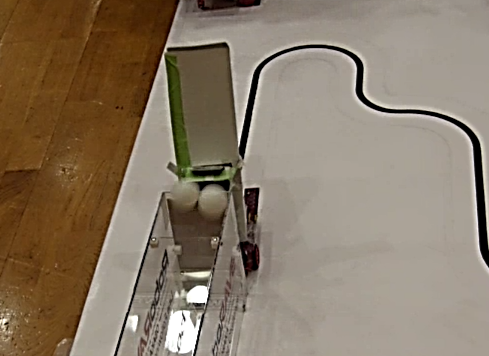
図8-2)レバーの奥が「くの字」に折れてピン球を打ち出す
図9)タワー・クレーン ロボット ビル建設用のタワー・クレーンのようです。残念ながら途中で倒れてピン球が落下。それでもなお走行を続け、ついには脱線して紙面外の床上を「尺取り虫のように前後に揺れながら走行」していきました。けなげにも必死で頑張るロボットを見て、周りの人たちから大きな歓声が湧上がっていました。
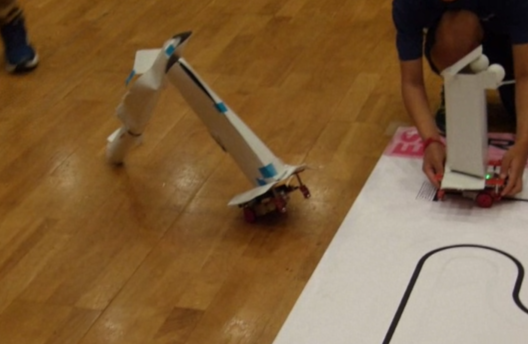
図10)お辞儀ロボット 到着直前に車体を前後に揺らすことで、荷台を前に傾けてピン球を箱の中に落とし込む。1球目は成功するも2球目以上はこぼれた。タワーの前だけを車体に固定するという柔軟な発想。
これらの他にも傑作や労作が沢山あって全部を紹介したいのですが、紙面の都合などで省かせてもらいます。
2.ロボットによる押出し相撲
ミッションが終了した人は、図11)のリングで、車型ロボット同士の押出し相撲を楽しみました。

図11)約1m四方の相撲リング
図12)は、ヒロ先生解説の相撲用プログラムで、基本的には車型ロボットを左右に振り回すようになっています。
また、図13)は、参加者が楽しんでいる様子です。
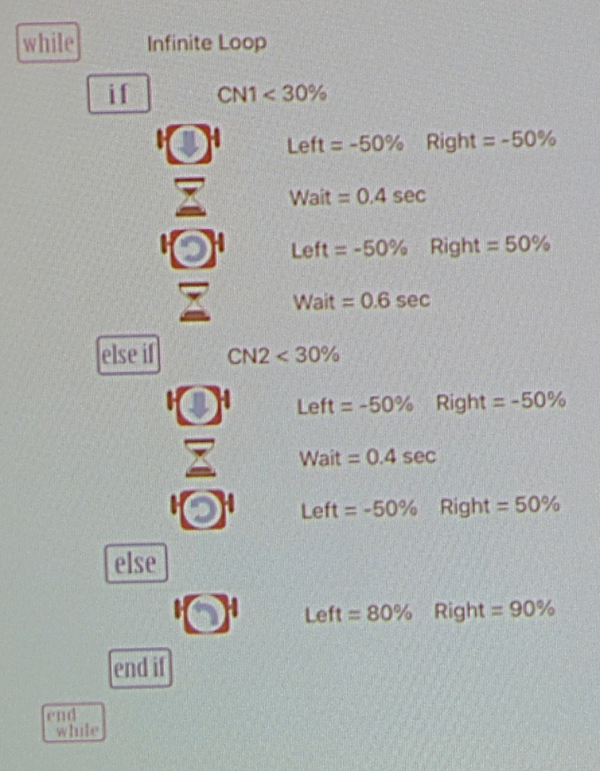
図12)相撲用プログラムの例
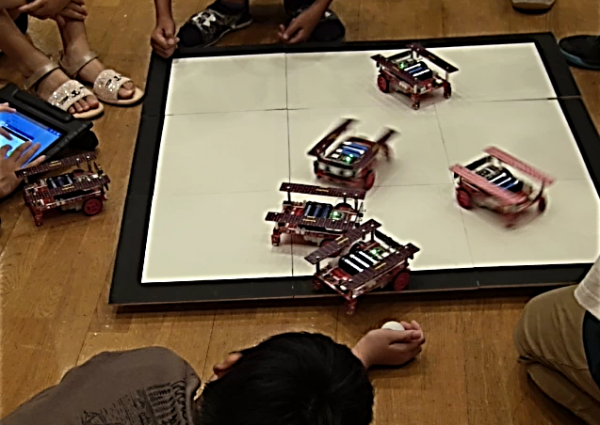
図13)リングで押出し相撲を楽しむ
3.講座の終了に当たって
◆ ヒロ先生から、講座に参加し最後まで頑張ってもらったこと、また、自身も楽しみながら進めることができたことへの感謝と、成長した際にはこのようなロボットの開発やプログラマーなどの仕事も選択肢の1つとして選んで貰えると嬉しいということが述べられました。
◆ 続いて、この秋開催予定の RoboRAVE(ロボレーブ)2024大阪大会への参加の案内、及び、電波新聞社発行の 「電子工作マガジン」 への今回のプログラミング講座の投稿予定などについて説明がなされました。
◆ 締めくくりでのヒロ先生からの問い掛けに応えて、参加者からは次の様な感想や質問が出されました。
「こんなに(家来のように)自分に従ってくれるものがあって嬉しい」、「もっと続けてやって欲しい」、「来年もやって欲しい」、「ヒロ先生は社長なの?」 など。
- (その3)でも記載しましたが、実習会場で待機しておられた別の二組の保護者(両親)の声を紹介します。
【保護者1】 学校への案内で、子どもが興味をもってやりたいと言うので申し込んだ。楽しそうに取り組んでいるので参加させて良かった。
【保護者2】 低学年は直感で改造してトライしているが、高学年になるとイロイロ考えて、工夫を凝らしてトライしているのが良く分る。そう言ったことでも興味深い。
◆ 筆者の感想は(その3)でも記載しましたが、プログラミングとピン球を運んで箱に入れる荷台を作るという作用は完全に別物だなと改めて考えさせられて、当講座が誠に興味深いものになったことです。因みに、プログラミングはほぼ全員がマスターしたと思われますが、工作が必要となるピン球運びの成功者は約半数であったと思われます。
いずれにしろ、受講生たちの柔軟な発想と果敢な挑戦に感銘を受けており、改めての開催が期待される講座となりました。
記録は以上となります。最後まで読んでいただいてありがとうございました。
