
本文
【ブログ】くろまろ塾 ロボットプログラミング講座 その1
くろまろ塾本部講座 基礎から学ぶ ロボットプログラミング講座 ~Roborave (ロボレーブ)大阪大会に参加を目指そう~
( その1:学習の仕組み )
印刷ページ表示 更新日:2024年7月○○日更新
◆今回のレポート
こんにちは。 くろまろ塾運営ボランティアスタッフの栗栖です。
この記事は、6月22日開催の 「基礎から学ぶ ロボットプログラミング講座(全6回)」の2回目の講座での取材を元にして、本講座全体に共通する学習の仕組みをまとめたものです。
全日程:6月9日(日曜日)・22日(土、以降すべて土)、7月13日・20日、8月10日・24日の6回
時間:9時30分~11時30分、 会場:キックス4階 創作工房
◆RoboRAVE(ロボレーブ)とは
RoboRAVE(ロボレーブ)は、アメリカ発信の教育プログラムで「Robots Are Very Educational」の頭文字をとったものです。小学3年生から高校生までを対象とし、コンピューターを使ったプログラミング学習やロボット制御の体験を通じて科学とモノづくりへの関心を高め、柔軟な想像力・理論的思考力を育むことを目的としています。
図1)講座のオープニング画像
◆講座の目的と目標
(1)目的
前掲のRoborave(ロボレーブ)の目的に沿った実践の場です。平成29年告示の学習指導要領でプログラミング教育が必修化されたこと(小学校は2020年度、中学校は2021年度から)が背景となっています。
(2)目標
10月末開催予定のRoboRAVE(ロボレーブ)2024大阪大会への参加を目指します。
同大会では、図2)折れ曲がった板上の走行、図3)と図4)ピン球を運ぶ、相撲などの競技が行なわれます。

図2)板上の走行
図3)曲線に沿って走行して
図4)ピン球を運ぶ
◆講師
株式会社ダイセン電子工業(以下、Daisen社という) 代表取締役 田中宏明先生と助手の新先生。
同社は、 2004年から教育用ロボットプログラミングキットの開発・製造・販売などを行なっています。また、先に記したプログラミング教育の義務化に伴って、日本全国の学校や教育機関などでの出前授業や教職員向けの研修、教科書・指導書などへの資料提供や小・中学校のタブレットへのアプリの搭載、或いは、ロボットの貸し出しや販売など多彩な業務を行なっています。
◆参加者
当初の応募者40名の中から抽選で選ばれた20組(24名)。
学年構成は、小(3)4名、小(4)6名、小(5)7名、小(6)5名、中(1)1名、中(2)1名。女子2名で殆どが男子。学校が異なって顔見知りでないため、全員がニックネームなどでの名札を付けます。なお、講師の先生もそれぞれ、「ヒロ」、「アラタ」の名札を着用。
参加者は、任意で六つの机に3~4名ずつ着席。保護者も教室内で見守ります。図5) 参照

図5)教室風景
◆教材
机の上には、ロボット操作のプログラミングを行なう 「ipad」、4輪で前輪駆動の 「車型ロボット」、「ラインフォローイング(凹模様のループが描かれた紙)」が人数分用意されています。ipadと車型ロボットは、識別番号で対にされており、無線で繋がっています。 図6)参照
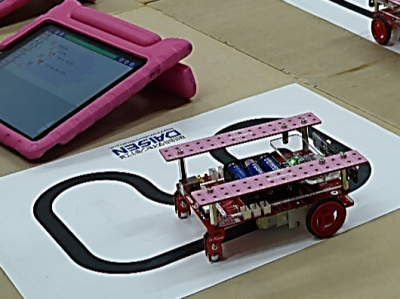
図6)ipad、4輪の車型ロボット、ラインフォローイング
ipadの概要 ipad には、車型ロボットを動かすためのプログラミングソフト 『C-Style』(Daisen社開発)がツールとして装備されています。 『C-Style』 は、コンピュータソフトの 『C言語』 をアイコン化したもので、タッチ操作で直感的にプログラミングを行なうことができます。図7~9) 参照
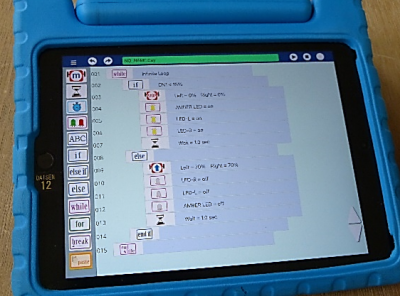
図7)ipad 図8)アイコンの説明 参照
ipadの画面上では、車型ロボットの駆動輪を動かすモーターの制御(両輪ごとに、直進、後退、左折、右折、左回転、右回転などの操作やストップ)、時間待ちの設定、プログラムのダウンロードなどの操作をいずれもワンタッチで行なうことができます。図8)、図9)参照

図8)アイコンの説明
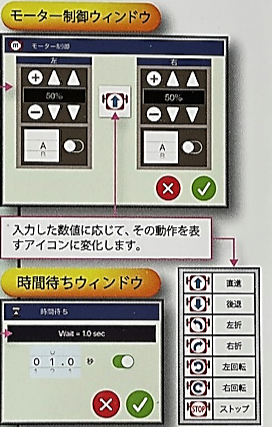
図9)モーター制御ウインドウと時間待ちウインドウ
車型ロボットの概要 車型ロボットには、単3乾電池を動力源とする2個の前輪、キャスター2個、前方向障害物検知センサー2個、床面検知センサー2個、前側と上側に赤黄緑色などのLEDランプ、及びこれらを制御するコンピューターと信号変換器、スイッチなどが装備されています。図10)参照
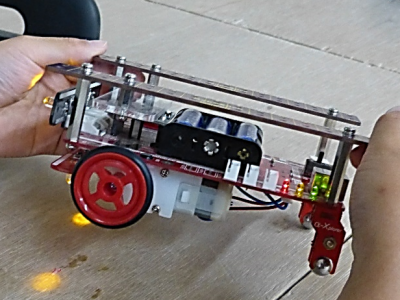
図10)車型ロボット
◆2回目の講座のプログラミング実習
目標とするRoboRAVE(ロボレーブ)2024大阪大会に合わせて、次の内容のプログラミング実習が行なわれました。詳細は、別ブログ 「プログラミング実習2回目」 を参照願います。
(1)1秒前進、1秒後退して車型ロボットを止める
(2)1秒前進、1秒後退を永久に行なう
(3)机から落ちそうになったら車型ロボットを止める
(4)机から落ちそうになったら車型ロボットを止めて、ランプを点灯させる
(5)ラインフォローイングの凹曲線に沿って車型ロボットを周回させる
(6)前方に障害物を検知したら車型ロボットを止める
学習の仕組みは以上となります。 最後まで読んでいただいてありがとうございました。
<参考資料>
・くろまろ塾 「講座リーフレット」
・ダイセン電子工業パンフレット 「単なる『教材』では終わらない」 Since1987
・第2回講座での投影画像
